新一代信息技術
不確定環境接觸下的可重構機器人分散學習最優控制方法
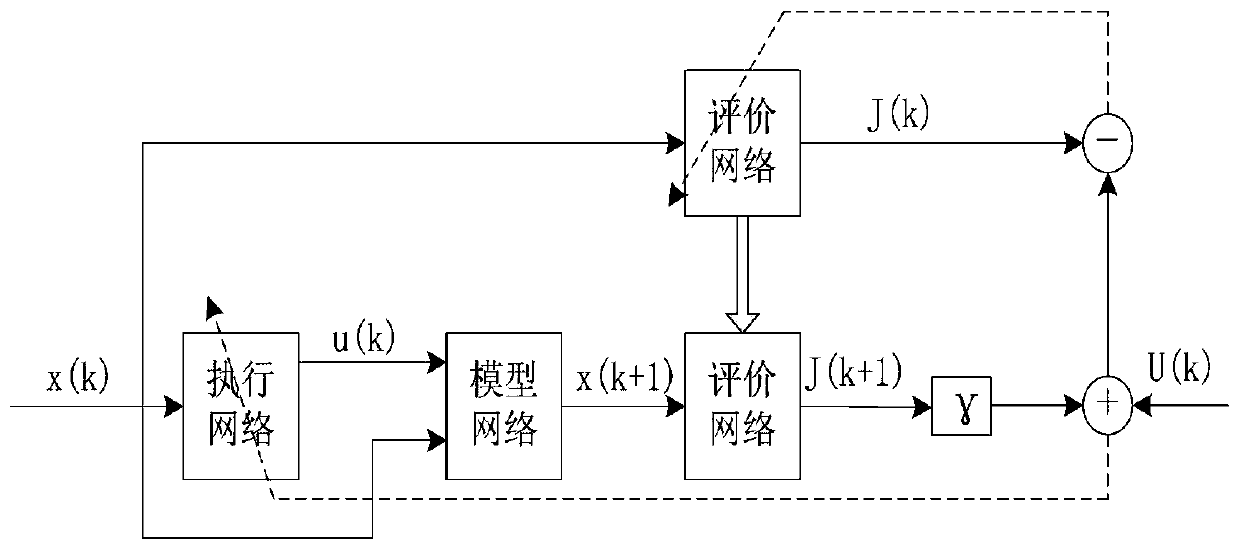
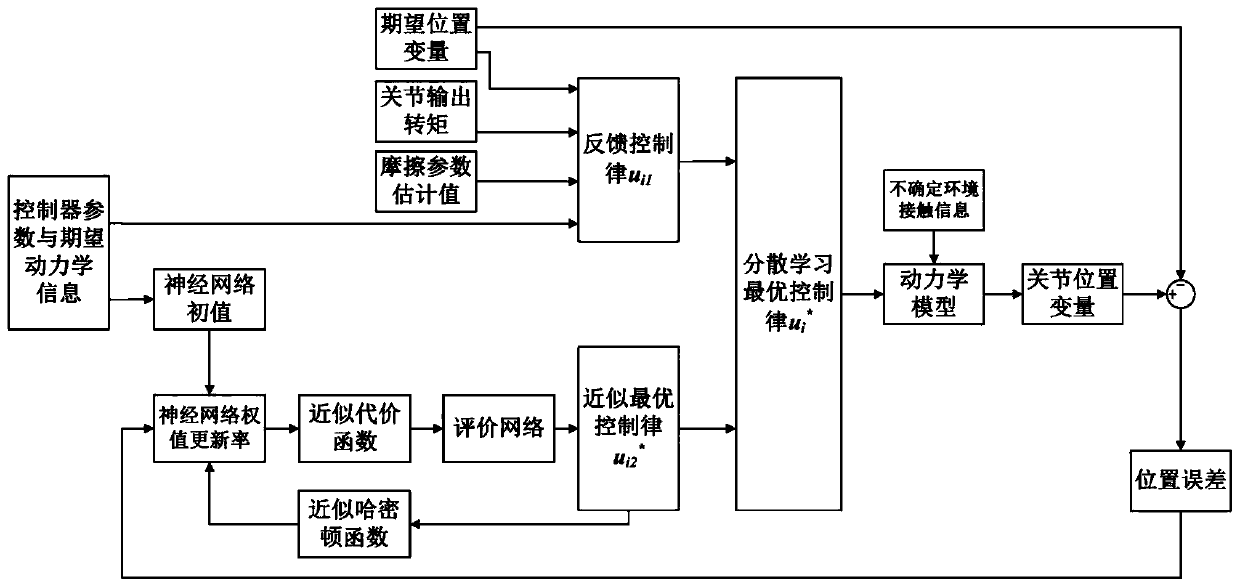
不確定環境接觸下的可重構機器人分散學習最優控制方法,屬于機器人控制算法領域,為了解決傳統的可重構機器人控制方法中存在機器人關節的抖振效應及穩定性和控制精度低的問題,首先建立可重構機器人系統動力學模型,通過對可重構機器人關節子系統間的耦合力矩交聯項的分析,然后構建代價函數與HJB方程,通過基于策略迭代的學習算法,來求HJB方程的解,接下來采用神經網絡對代價函數進行近似,最后通過仿真驗證所提出控制方法的有效性;該方法可以在面向不確定環境接觸的條件下,使機器人系統實現良好的穩定性與控制精度,可以在提高可重構機器人控制精度的同時,降低系統執行器的能耗,并降低了機器人系統動力學模型的復雜性。
長春工業大學
授權發明