高端裝備制造
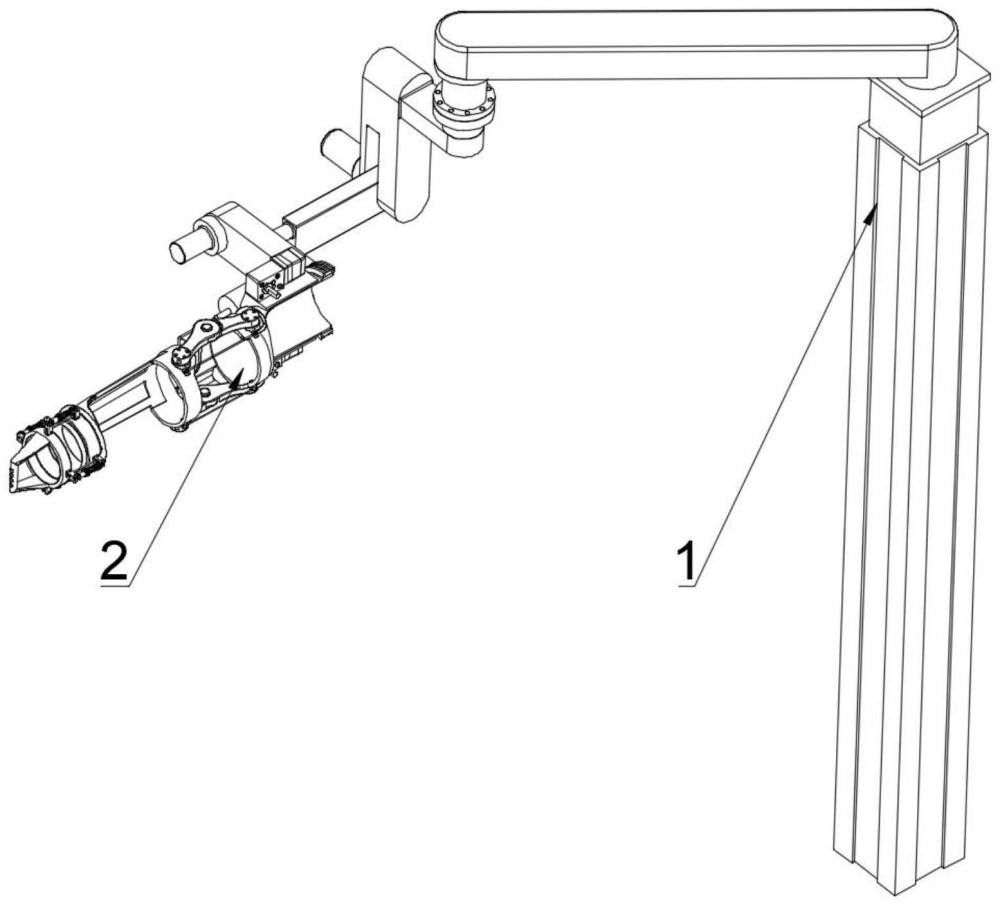
一種六自由度可穿戴柔性繩驅外骨骼式上肢康復訓練機器人
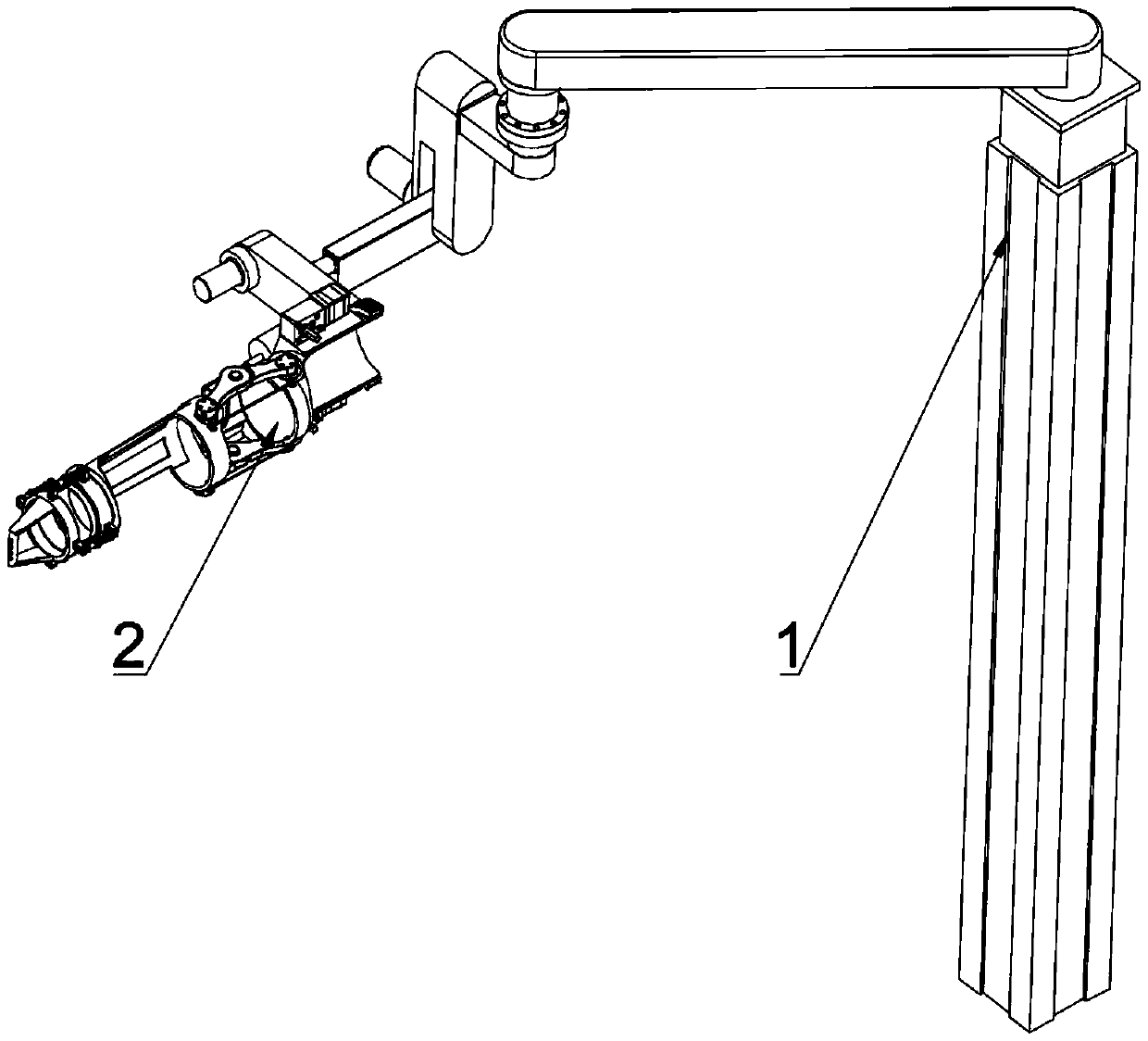
本發明針對現有技術的不足,提供一種六自由度可穿戴柔性繩驅外骨骼式上肢康復訓練機器人,采用了繩驅動的方式,裝置慣性小,系統整體具有運動連貫性與流暢性,避免了對患者的二次傷害;并且未通過關節轉盤等較大機構來實現關節所需的自由度,空間利用率高,穿戴更舒適,更輕便,更貼合人手臂的運動特性;擁有六個主動自由度,可對上肢功能障礙人群提供全方位安全可靠的康復訓練。本發明提供了一種六自由度可穿戴柔性繩驅外骨骼式上肢康復訓練機器人,其組成包括:地面支撐部分和可穿戴部分,其中地面支撐部分中的立柱與地面連接,地面支撐部分中的圓弧導軌模塊與穿戴部分中的大臂固定裝置連接。
長春理工大學
授權發明