新一代信息技術
機器人控制裝置、機器人、機器人控制方法及存儲介質
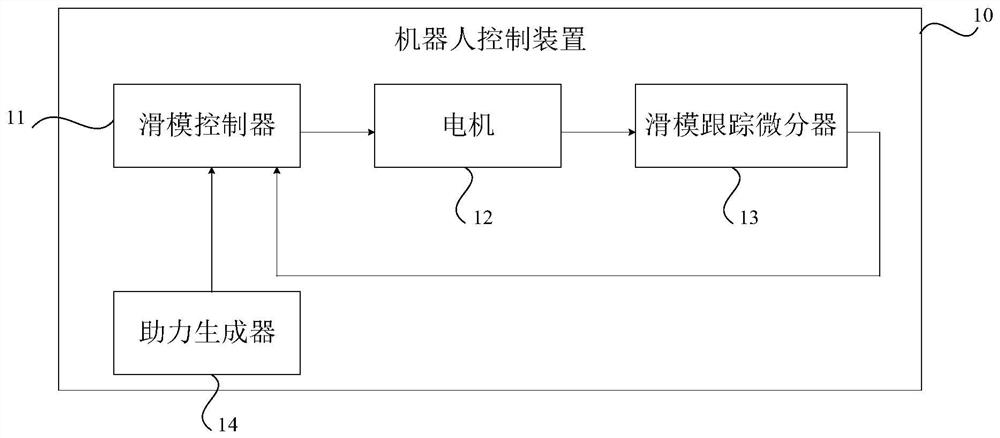
本申請涉及一種機器人控制裝置、機器人、機器人控制方法及存儲介質,所述裝置包括:滑模控制器、電機、滑模跟蹤微分器和助力生成器,滑模控制器的輸出端與電機的輸入端連接,電機的輸出端與滑模跟蹤微分器的輸入端連接,滑模跟蹤微分器的輸出端與助力生成器的輸出端均與滑模控制器的輸入端連接;滑模跟蹤微分器,用于對電機輸出的實際助力值進行去噪處理,得到去噪后的助力值,并將去噪后的助力值傳輸給滑模控制器;滑模控制器,用于根據去噪后的助力值和助力生成器得到的目標助力值之間的誤差值,調整電機輸出的實際助力值。本申請實施例提供的技術方案可以步行助力機器人與穿戴者的協調性。
延邊大學|哈爾濱工業大學深圳研究生院