| 專利名稱 | 一種考慮多目標的車輛自適應巡航控制方法 | ||
|---|---|---|---|
| 申請號/專利號 | CN201610351859.6 | 專利權人(第一權利人) | 吉林大學 |
| 申請日 | 2016-05-25 | 授權日 | 2018-06-26 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 雙五星 |
| 技術主題 | 動態模型|遞歸方法|巡航控制|車頭時距|節流閥|控制算法|多目標|模型預測控制|車輛駕駛|車輛控制|模型預測|運動學模型|加速度 | ||
| 應用領域 | 外部條件輸入參數|外部條件輸出參數 | ||
| 意向價格 | 具體面議 | ||
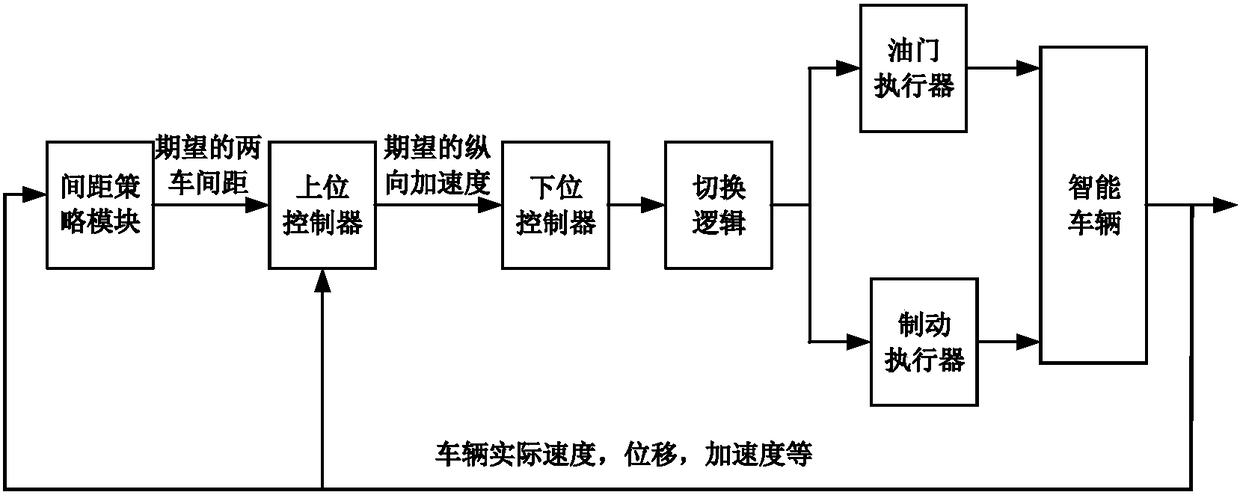
| 專利概述 | 本發明公開了一種考慮多目標的車輛自適應巡航控制方法,采用分層控制策略:上層控制根據目標車輛以及被控車輛當前的狀態,決策出期望的縱向加速度,下層控制通過逆推的方法實現對期望縱向加速度的跟蹤,包括以下步驟:建立兩車相互縱向運動學模型;設計模型預測控制器,根據恒定車頭時距策略獲得期望的兩車間距,利用模型預測控制算法決策出跟蹤該期望車間距所需要的期望縱向加速度;將車輛控制工況分為驅動工況和制動工況,對兩種工況分別根據車輛行駛方程建立車輛逆縱向動力學模型;根據車輛逆縱向動力學模型,在驅動工況下按照期望加速度求得期望的節氣門開度,在制動工況下按照期望的加速度求得期望的制動踏板開度。 | ||
| 圖片資料 |
|
||
| 合作方式 | 面議 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |