| 專利名稱 |
面向約束的可重構機械臂非奇異終端滑模力位置控制方法 |
| 申請號/專利號 |
CN201610970851.8 |
專利權人(第一權利人) |
長春工業大學 |
| 申請日 |
2016-11-01 |
授權日 |
2020-05-12 |
| 專利類別 |
授權發明 |
戰略新興產業分類 |
新一代信息技術 |
| 技術主題 |
系統動力學模型|控制工程|機器人|控制信號|位置控制|機器人控制|終端滑動模式控制|控制力|神經網絡|非線性|機械手系統 |
| 應用領域 |
程序控制機械手|幾何CAD|基于約束的CAD|特殊數據處理應用 |
| 意向價格 |
具體面議 |
| 專利概述 |
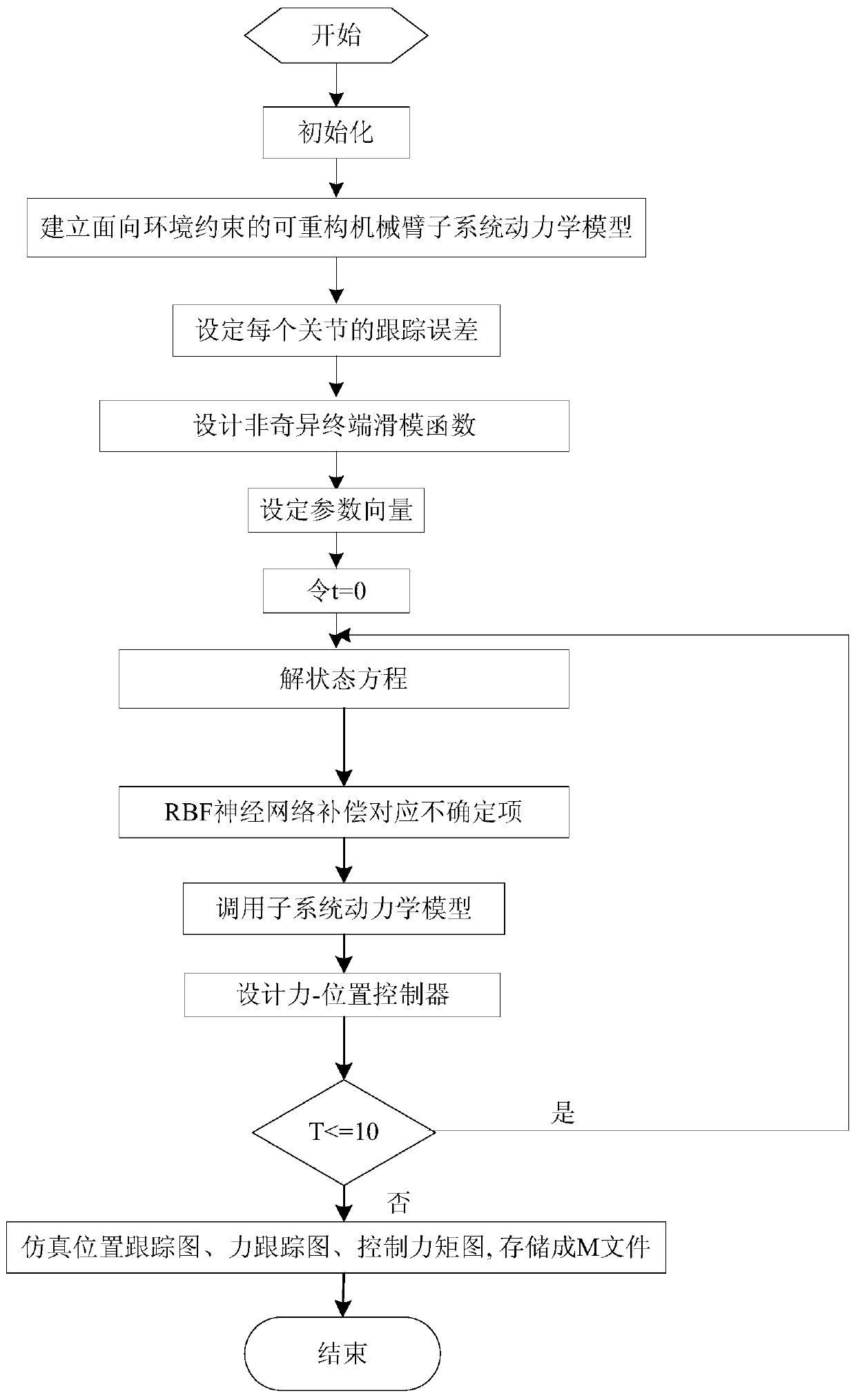
面向約束的可重構機械臂非奇異終端滑模力位置控制方法,屬于機器人控制方法及受約束系統控制方法領域,為了解決傳統終端滑模控制力位置控制方法中存在的跟蹤精度低、收斂速度慢、存在抖振的問題,在建立面向約束的可重構機械臂系統動力學模型的基礎上,提出一種新穎的非奇異終端滑模函數,引入了RBF神經網絡來補償系統未知非線性項、關節之間耦合項和模型不確定項,并發明了非奇異終端滑模力位置控制方法,使得軌跡跟蹤誤差在有限時間內收斂到零,同時控制器本身具有較強的魯棒性,使得控制器抖振效應得到有效抑制,并使控制信號在整個過程中變得光滑,而且保證了軌跡的跟蹤精度,實現高精度、微抖振的可重構機械臂系統力位置控制。 |
| 圖片資料 |
|
| 合作方式 |
具體面議 |
| 聯系人 |
戚梅宇 |
聯系電話 |
13074363281 |