| 專利名稱 |
基于自適應動態規劃的可重構機械臂保代價分散控制方法 |
| 申請號/專利號 |
CN201810851336.7 |
專利權人(第一權利人) |
長春工業大學 |
| 申請日 |
2018-07-30 |
授權日 |
2021-06-22 |
| 專利類別 |
授權發明 |
戰略新興產業分類 |
新一代信息技術 |
| 技術主題 |
動態模型|迭代法|績效指標|動態計劃|動態規劃|自適應|神經網絡|控制算法|系統工程|電機|控制系統|控制工程|機器人|兩個自由度|機器人控制系統|離心力|機械手|科里奧利力|動力學模型|能源消耗 |
| 應用領域 |
程序控制機械手 |
| 意向價格 |
具體面議 |
| 專利概述 |
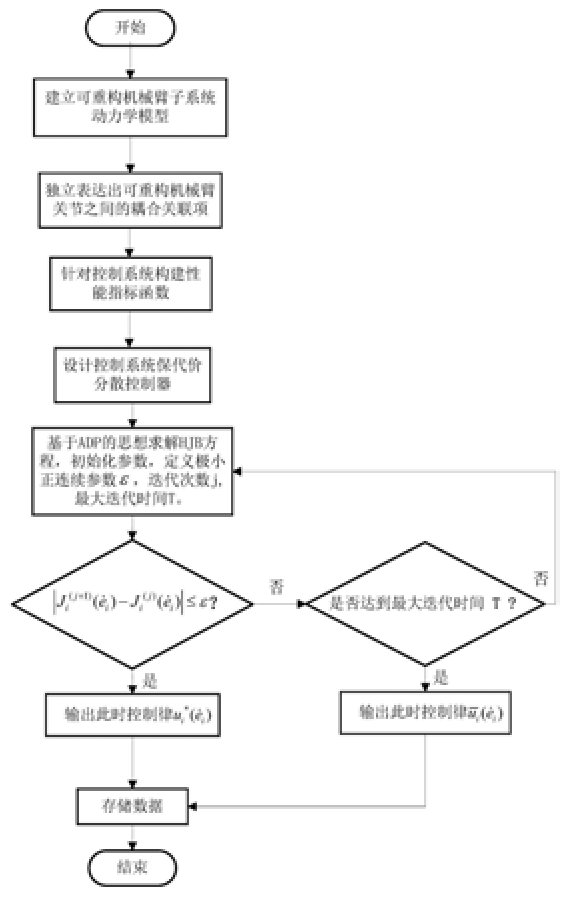
基于自適應動態規劃的可重構機械臂最優保代價分散控制方法,屬于機器人控制系統及控制算法領域,為了解決傳統的可重構機械臂控制方法中關節耦合的交聯項對系統整體控制干擾、可重構機械臂重構及控制過程中能耗問題、電機實際工作過程中不確定性允許范圍問題,該方法構建可重構機械臂子系統的動力學模型,并且用可重構機械臂慣性項、哥氏力和離心力項、重力項將各個關節之間的耦合交聯項單獨表示出來,構建性能指標函數和HJB方程,通過基于ADP策略迭代的方法求解HJB方程,運用神經網絡補償關節之間的耦合交聯不確定項,最后通過不同構形二自由度的機械臂數值仿真驗證了算法的有效性;實現了可重構機械臂的高精度控制。 |
| 圖片資料 |
|
| 合作方式 |
具體面議 |
| 聯系人 |
戚梅宇 |
聯系電話 |
13074363281 |