| 專利名稱 | 基于多智能體的ASR自適應非奇異終端滑模控制方法 | ||
|---|---|---|---|
| 申請號/專利號 | CN202010607908.4 | 專利權人(第一權利人) | 長春工業大學 |
| 申請日 | 2020-06-30 | 授權日 | 2022-05-06 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 新一代信息技術 |
| 技術主題 | 控制工程|尺寸|系統控制器|路面|控制參數|自適應|終端滑動模式控制|工業工程學|控制器設計|圖論|數學圖 | ||
| 應用領域 | 自適應控制 | ||
| 意向價格 | 具體面議 | ||
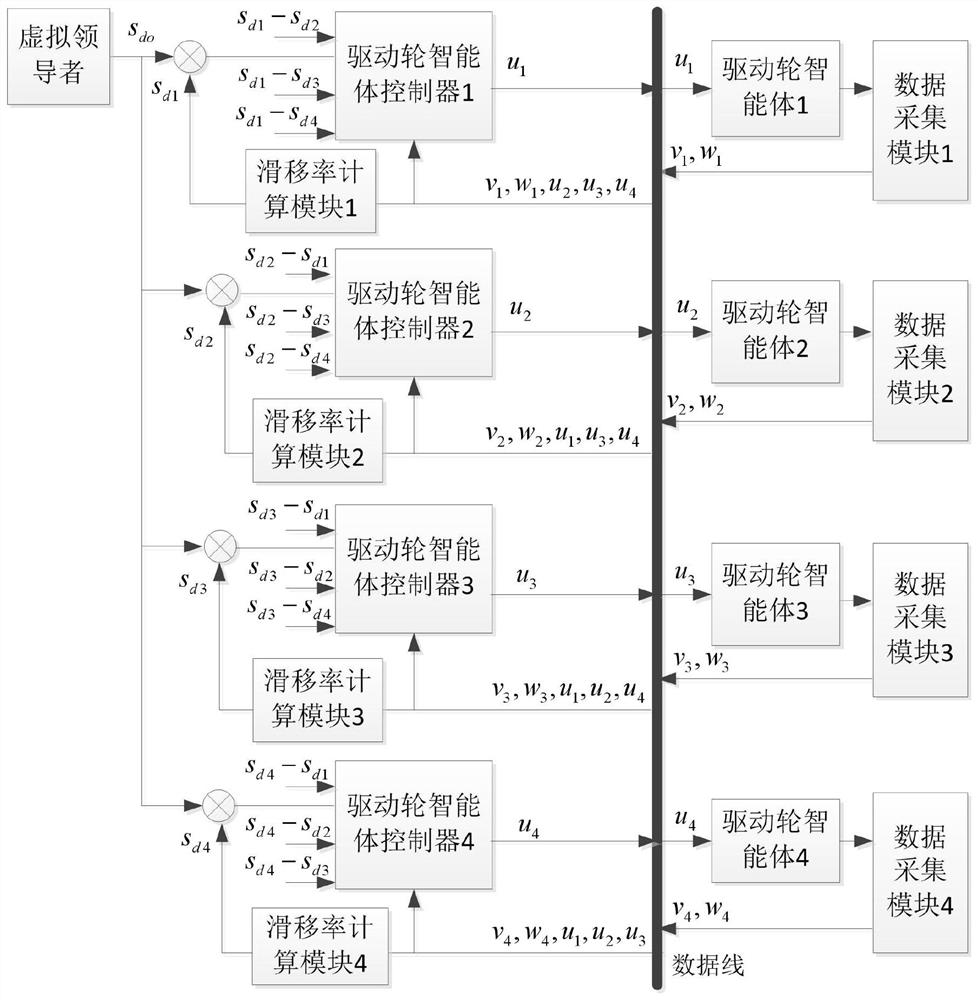
| 專利概述 | 基于多智能體的ASR自適應非奇異終端滑模控制方法涉及ASR控制領域,該方法基于圖論將ASR分解為四個單車輪智能體子系統以降低模型維數,將ASR控制器設計轉化為單輪智能體子系統控制器設計,并提出一種單輪智能體自適應非奇異終端滑模控制器,采用自適應估計機制來選擇控制器切換項增益,并且通過控制參數的選擇可調整實際滑移率達到理想滑移率值的時間。本發明實現了在不同的路面附著條件下,車輪的實際滑移率在有限的時間內達到理想的滑移率值,有效地避免了車輪打滑的問題,提高系統的安全性和驅動能力。 | ||
| 圖片資料 |
|
||
| 合作方式 | 具體面議 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |