| 專利名稱 | 一種基于改進蟻群算法的無人機航跡規劃方法 | ||
|---|---|---|---|
| 申請號/專利號 | CN202111031276.2 | 專利權人(第一權利人) | 長春工業大學 |
| 申請日 | 2021-09-03 | 授權日 | 2024-05-17 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 新一代信息技術 |
| 技術主題 | 環境模擬|軌跡規劃|控制理論|蟻窩|規劃算法 | ||
| 應用領域 | 內燃活塞發動機|車輛位置/路線/高度控制|位置/方向控制 | ||
| 意向價格 | 具體面議 | ||
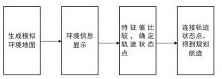
| 專利概述 | 本發明提出使用基于改進蟻群算法的無人機航跡規劃算法對無人機運動軌跡進行規劃,通過在算法中加入狀態參數方程,并設置狀態方程的閾值,通過比較求解值與閾值的大小等操作來減少實際運動軌跡長度,達到減少航跡長度的目的。具體步驟如下:首先是生成無人機要執行任務的環境模擬地圖;然后是確定無人機執行任務的起始狀態點與目標狀態點,以及隨機生成的障礙物區域;接下來在算法中加入狀態參數方程以及閾值;其次進行相應的特征值比較,確定狀態點與周圍相鄰兩個狀態點之間到目標狀態點的軌跡長度值,得到規劃的航跡狀態點;最后通過連接已確定的航跡軌跡點,得到改進后的無人機航跡線路圖。 | ||
| 圖片資料 |
|
||
| 合作方式 | 具體面議 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |