| 專利名稱 | 一種改進APF-RRT算法的機器人避障路徑規劃方法 | ||
|---|---|---|---|
| 申請號/專利號 | CN202211189700.0 | 專利權人(第一權利人) | 長春工業大學 |
| 申請日 | 2022-09-28 | 授權日 | 2024-08-30 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 新一代信息技術 |
| 技術主題 | 機器人|路徑|路徑長度|改進算法|障礙避免|控制理論|算法效率 | ||
| 應用領域 | 程序控制機械手 | ||
| 意向價格 | 具體面議 | ||
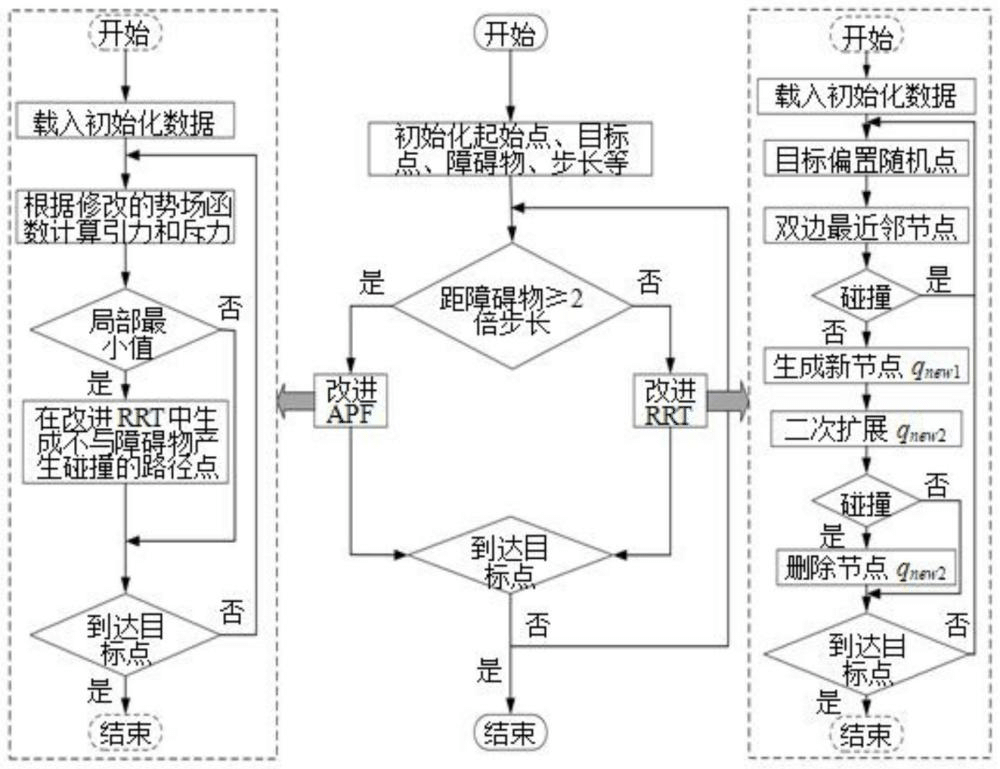
| 專利概述 | 本發明公開了一種改進APF?RRT算法的機器人避障路徑規劃方法,在已知起始位置,目標位置和障礙物環境信息的條件下,利用改進APF?RRT算法,引入障礙物數目參數和算法切換策略避免傳統APF算法無法到達目標點和陷入局部最小值,引入雙邊最近節點選擇策略、節點兩次拓展策略、圓錐體子集約束采樣和目標引導結合的混合采樣策略,加快改進RRT算法的收斂效率,采用去除冗余節點和3次非均勻有理B樣條曲線平滑策略對避障路徑進行裁剪和平滑;提出的改進APF?RRT算法減少了路徑長度,提升了算法效率,可以很好地適用于機器人避障路徑規劃問題。 | ||
| 圖片資料 |
|
||
| 合作方式 | 具體面議 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |