| 專利名稱 | 一種協作機器人最優控制方法、裝置、介質及產品 | ||
|---|---|---|---|
| 申請號/專利號 | CN202410961925.6 | 專利權人(第一權利人) | 吉林省恒創智能裝備有限公司 |
| 申請日 | 2024-07-18 | 授權日 | 2024-11-05 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 新一代信息技術 |
| 技術主題 | 逆運動學|機器人控制|軌跡規劃|控制理論|協作機器人|機器人軌跡|工業工程學|神經網絡|控制算法 | ||
| 應用領域 | 程序控制機械手|全面工廠控制|自適應控制 | ||
| 意向價格 | 具體面議 | ||
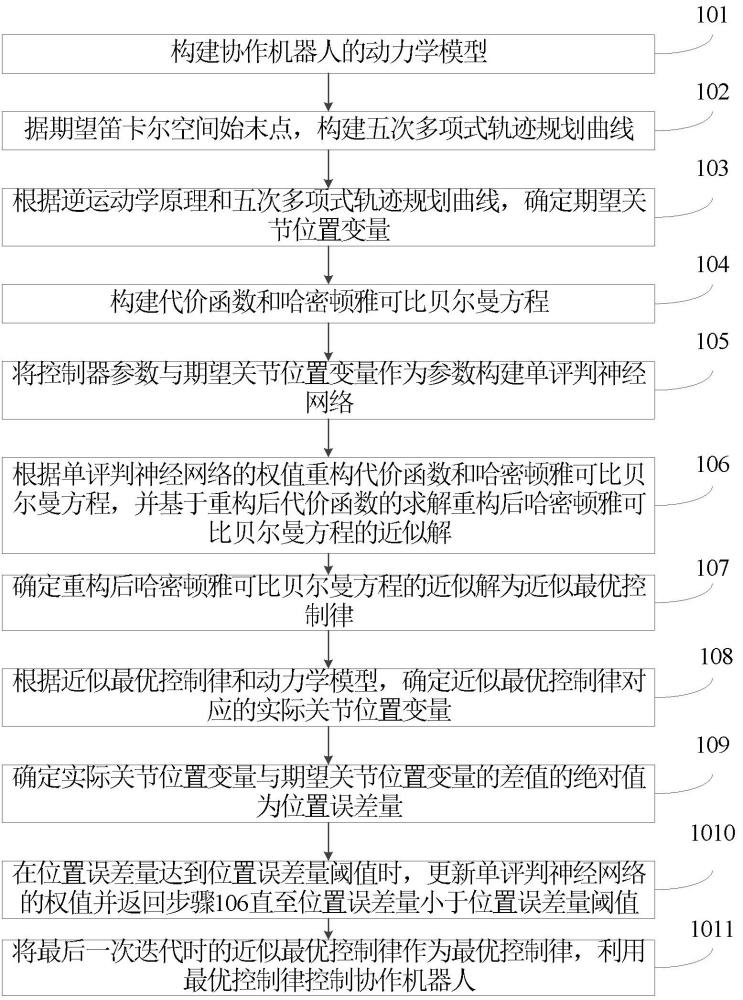
| 專利概述 | 本發明公開了一種協作機器人最優控制方法、裝置、介質及產品,涉及機器人軌跡規劃和控制算法技術領域。本發明根據逆運動學原理和五次多項式軌跡規劃曲線,確定期望關節位置變量;將控制器參數與期望關節位置變量作為參數構建單評判神經網絡;更新單評判神經網絡的權值求解重構后哈密頓雅可比貝爾曼方程的近似解;進而控制協作機器人。本發明基于五次多項式軌跡規劃和單評判神經網絡能夠克服協作機器人控制過程中存在的角速度變化不平滑和加速度跳躍問題。 | ||
| 圖片資料 |
|
||
| 合作方式 | 具體面議 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |