| 專利名稱 | 一種G3連續(xù)且運動平穩(wěn)的機器人路徑光順方法 | ||
|---|---|---|---|
| 申請?zhí)?專利號 | CN202411805855.1 | 專利權(quán)人(第一權(quán)利人) | 長春工業(yè)大學(xué) |
| 申請日 | 2024-12-10 | 授權(quán)日 | 2025-10-28 |
| 專利類別 | 授權(quán)發(fā)明 | 戰(zhàn)略新興產(chǎn)業(yè)分類 | 高端裝備制造 |
| 技術(shù)主題 | 機器人路徑|G3連續(xù)|路徑光順|運動平穩(wěn)|軌跡規(guī)劃|機器人控制|智能制造 | ||
| 應(yīng)用領(lǐng)域 | 程序控制機械手 | ||
| 意向價格 | 具體面議 | ||
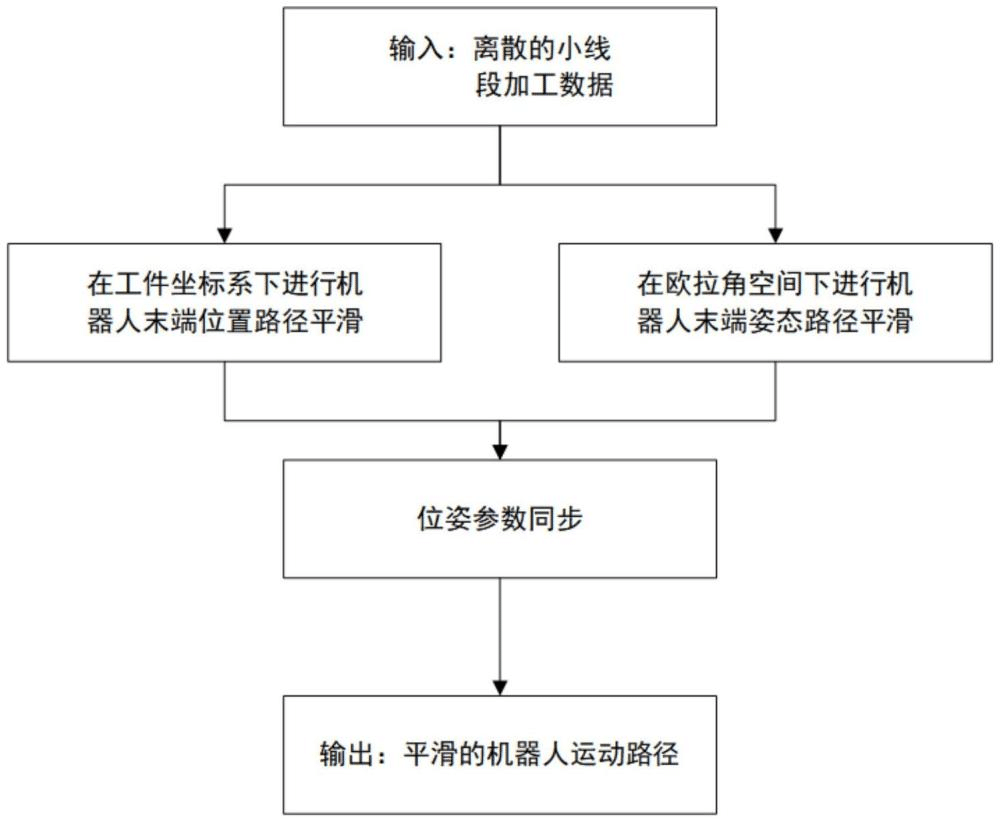
| 專利概述 | 本發(fā)明是一種G3連續(xù)且運動平穩(wěn)的機器人路徑光順方法。首先,在工件坐標(biāo)系下進行機器人末端位置路徑光順,通過構(gòu)建6次Bezier曲線拐角過渡模型,實現(xiàn)路徑銜接處的位置G3連續(xù)平滑轉(zhuǎn)接;其次,在繞工件坐標(biāo)系的歐拉角空間內(nèi)進行機器人末端姿態(tài)路徑光順,通過構(gòu)建6次Bezier曲線拐角過渡模型,實現(xiàn)路徑銜接處的姿態(tài)G3連續(xù)平滑轉(zhuǎn)接;最后,對轉(zhuǎn)接光順后的機器人末端位置和姿態(tài)路徑進行參數(shù)同步處理,通過考慮位姿同步條件和位姿路徑的幾何特性自適應(yīng)調(diào)整位置、姿態(tài)過渡參數(shù),確保末端姿態(tài)相對于位置路徑弧長的一階、二階、三階導(dǎo)連續(xù)。本發(fā)明能實現(xiàn)機器人末段位姿G3連續(xù)平滑轉(zhuǎn)接,沒有任何迭代計算,光順誤差可控的同時機器人末端工具刀軸角運動更平穩(wěn)。 | ||
| 圖片資料 |
|
||
| 合作方式 | 具體面議 | ||
| 聯(lián)系人 | 戚梅宇 | 聯(lián)系電話 | 13074363281 |