| 專利名稱 | 一種基于視覺的農業環境感知與機器人輔助采摘方法 | ||
|---|---|---|---|
| 申請號/專利號 | CN202510415456.2 | 專利權人(第一權利人) | 長春工業大學 |
| 申請日 | 2025-04-03 | 授權日 | 2025-08-08 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 高端裝備制造 |
| 技術主題 | 視覺|農業工程|激光雷達|活動識別|環境地質學|信息融合|機器人輔助|特征提取|短期記憶|農業環境|內存|機器人調度|對象檢測|活動檢測 | ||
| 應用領域 | 氣候變化適應|字符和模式識別|生物學模型 | ||
| 意向價格 | 具體面議 | ||
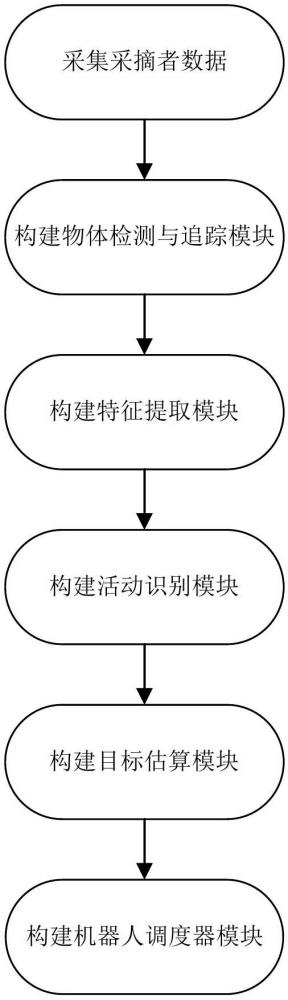
| 專利概述 | 本發明公開一種基于視覺的農業環境感知與機器人輔助采摘方法,該方法采用端對端檢測,跟蹤和分類框架,含物體檢測與跟蹤,特征提取,活動識別,目標位置估算,機器人調度器五個獨立模塊,利用RGB攝像頭和二維激光雷達獲取信息,通過定制長短期記憶網絡處理數據,與其他方法相比,本方法采用的端對端架構能夠使系統全面處理從采摘者活動檢測到機器人輔助操作的整個流程,采用的多攝像頭信息融合能夠準確估算采摘者在不同距離范圍內的位置,采用的定制長短期記憶網絡能夠準確預測采摘者的行為活動。 | ||
| 圖片資料 |
|
||
| 合作方式 | 具體面議 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |